Digital twin-based energy assessment in a human-robot collaborative workstation
By Chiara Nezzi on July 24th, 2025
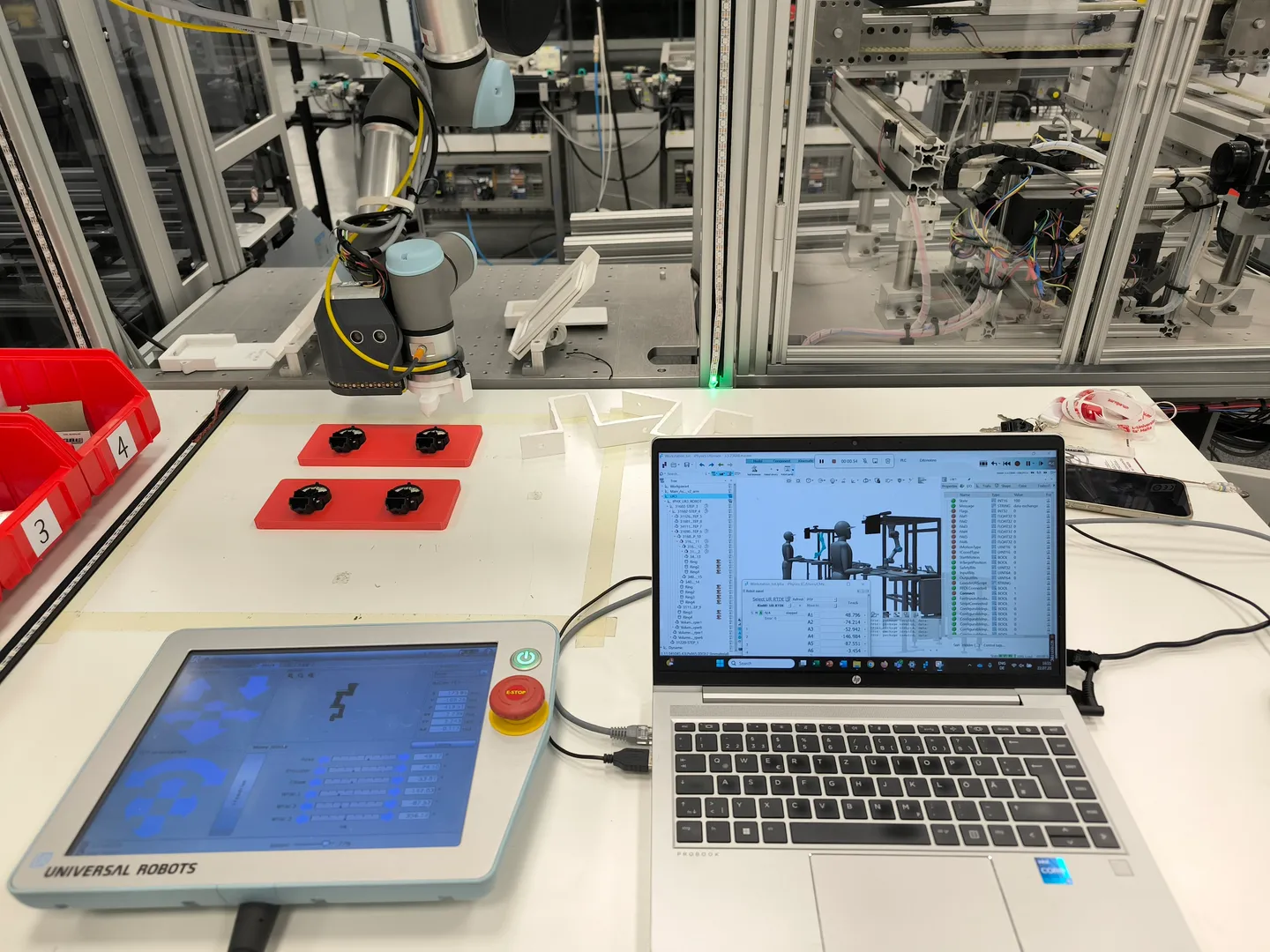
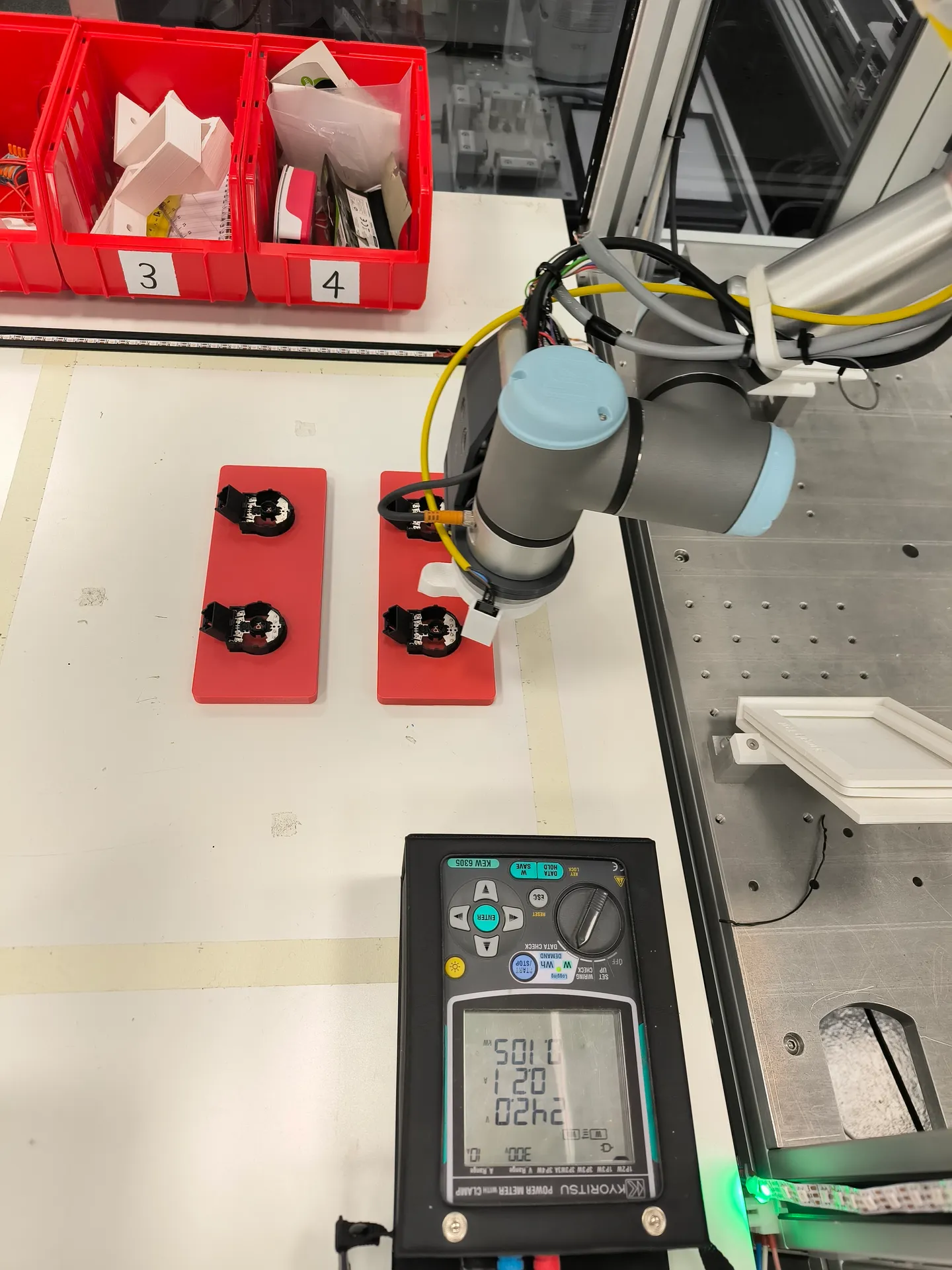
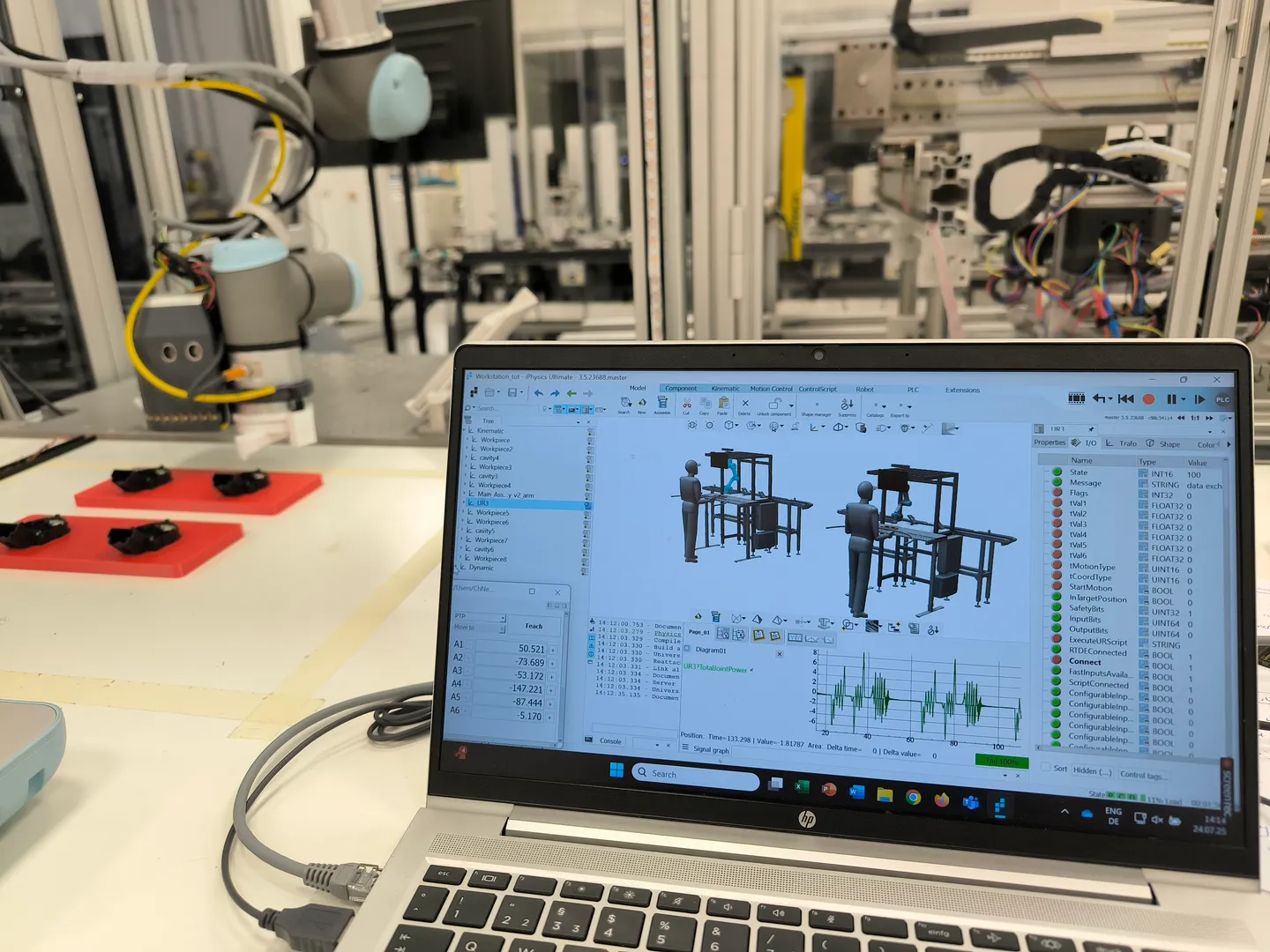
At the Digital and Automation Laboratory of the University of Malta, we have set up a human-robot collaborative workstation featuring a UR3 robot for industrial-like learning experiences. Using Axiomatic Design (AD) Decomposition, we’ve designed and assessed the setup for optimal functionality. In parallel, we've created a kinematic and dynamic model of the robot in a multibody software named iPhysics, focusing on real-time calculations of joint torques, power consumption, and energy usage. Data from the simulation is compared to readings from an energy meter, validating the energy consumption across a 30-minute robot cycle. These activities aim at bridging the gap between virtual and real-world robotics, enhancing hands-on learning and energy efficiency assessments.